Hi
Today I'd like to post some thermal data that I've gathered recently. I wanted to check what is the maximum continuous torque of my motor module. By continuous I mean the amount of torque the motor is able to produce infinitely without overheating. It seems that many actuator manufacturers interpret "continuous torque" differently - sometimes by continuous they mean a short period of time, which is far from being continuous (Josh made a similar observation in his log: https://jpieper.com/2020/08/07/up-rating-the-qdd100-beta-thermal-bounds/). I decided to test my actuators and determine what is their continuous torque rating. The test stand was rather simple - an actuator with a lever pushing against a table.
I was simply commanding different torque values and waiting for the actuator to heat up. This was quite a monotonous process as the estimated time constant was about 16 minutes and I stopped each experiment after a duration of five time constants (almost 1,5h).
I wanted to go one step further and prepare a simple first order system model. After all the thermal circuit can be modelled similarly to a simple parallel RC circuit, where the resistance is the thermal resistance form the module to air, capacitance is the thermal capacitance, voltage is temperature and current is power loss. The input to the system is power loss that occurs on the winding resistance. The model is able to fit a single curve, however due to changing thermal resistance to ambient it is no good in predicting a few different responses. This is the outcome:

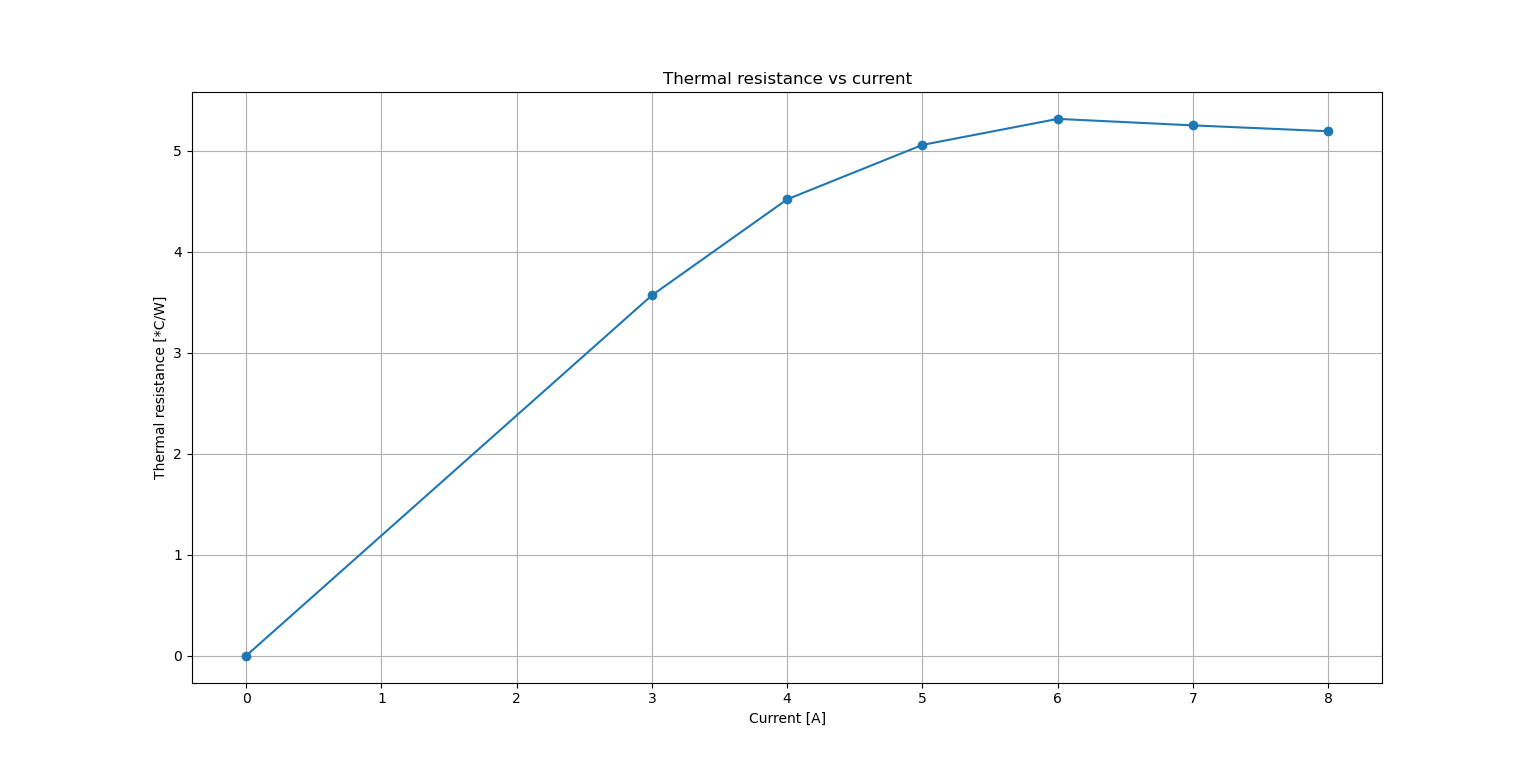
As you can see the thermal resistance varies with different currents being applied. This is why it is so hard to predict the resultant temperature response based solely on the current. Nevertheless the real characteristics helped me to determine the maximum continuous torque which is 0.875Nm (7A), and with that current the device should never reach 65*C.
In the next entry i'm going to publish some static torque data.













